TARZAN: Revolutionizing Autonomous Vehicle Navigation
Advanced Pothole Detection System
The Future of Intelligent Transportation
In the rapidly evolving landscape of automotive technology, autonomous vehicles represent more than just a technological marvel—they are a transformative solution to transportation challenges. The I.R.I.S. club's TARZAN project emerges as a groundbreaking initiative that pushes the boundaries of what's possible in autonomous vehicle navigation, particularly in challenging road conditions.
The Context of Autonomous Driving
The journey of autonomous vehicles has been fascinating. From Google's Self-Driving Car Project in 2009 to Tesla's Autopilot in 2015, the automotive industry has witnessed exponential growth. However, most existing solutions are limited to high-end vehicles with Advanced Driver Assistance Systems (ADAS).
TARZAN challenges this paradigm. Our project aims to democratize autonomous navigation technology, making it accessible to vehicles across different technological spectrums.
Understanding Autonomous Driving Levels
Before diving into TARZAN's specifics, let's understand the autonomous driving spectrum:
- Level 0 (No Automation): Traditional vehicles where the driver controls everything
- Level 1 (Driver Assistance): Basic features like adaptive cruise control
- Level 2 (Partial Automation): Simultaneous steering and acceleration/braking assistance
- Level 3 (Conditional Automation): Vehicle can manage most driving tasks, with driver ready to intervene
The TARZAN Approach: Intelligent Road Intelligent System
Core Technologies
TARZAN integrates multiple cutting-edge technologies:
- Computer Vision: Utilizing YOLOv8 for real-time object detection
- Machine Learning: Adaptive algorithms for intelligent decision-making
- Sensor Fusion: Combining multiple input streams for comprehensive environmental understanding
Pothole Detection Mechanism
The heart of TARZAN is its sophisticated pothole detection system:
- Real-time Processing: 30 frames per second video analysis
- Intelligent Classification: Categorizing potholes by severity
- Green: Small potholes (< 15,000 pixels)
- Yellow: Medium potholes (15,000 - 30,000 pixels)
- Red: Large potholes (> 30,000 pixels)
Navigation and Obstacle Avoidance
TARZAN employs an advanced A* pathfinding algorithm on a 30x30 grid, enabling:
- Dynamic route recalculation
- Immediate obstacle response
- Optimal path selection considering road surface quality
Performance Metrics: Proving the Concept
Our experimental results are compelling:
- Path Tracking Accuracy: Less than 0.5 meters deviation
- Obstacle Response Time: Under 200 milliseconds
- Detection Accuracy:
- Precision: 91%
- Recall: 89%
- Speed Adaptation: Seamless control between 0-60 km/h
Technical Deep Dive: How TARZAN Works
Data Processing Pipeline
- Input Capture: Video stream at 30 fps
- Frame Sampling: Process every fifth frame for efficiency
- Pothole Detection: YOLOv8 generates bounding boxes
- Severity Assessment: Area-based classification
- Navigation Adjustment: Immediate path recalculation
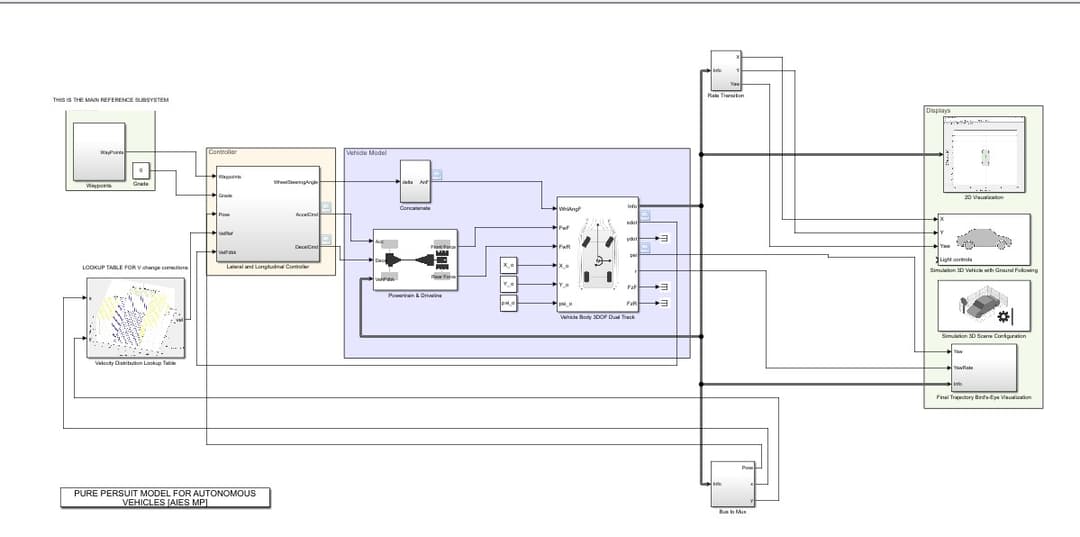
Simulation Framework
Our Pure Pursuit Controller enables:
- Precise waypoint tracking
- Dynamic velocity management
- Smooth trajectory following
Beyond Technology: The Vision
TARZAN isn't just a technical project—it's a vision of making roads safer, more accessible, and intelligent. By extending autonomous capabilities to vehicles without ADAS, we're democratizing advanced transportation technology.
Conclusion: The Road Ahead
As we continue refining TARZAN, we're not just developing a system—we're shaping the future of intelligent transportation. Our project demonstrates that with creativity, advanced algorithms, and a commitment to innovation, we can transform how we navigate our world.
Stay tuned for more updates from the I.R.I.S. Research Team!
Visual Insights of TARZAN's System
MATLAB System Diagram
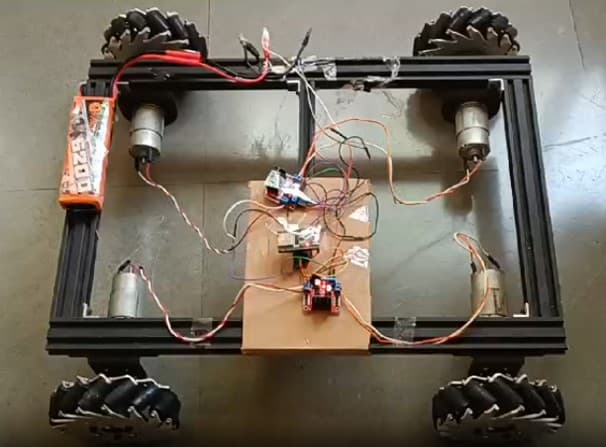
Chassis Design
Comments
No comments added yet.
Add your Comment